- „Ē„¶„¤„ó
-
- øų¼°„Ö„ķ„°„Ē„¶„¤„ó
- PCČĒ
- „¹„Ž”¼„Č„Õ„©„óČĒ
- „ę”¼„¶”¼ŗīĄ®
- „ę”¼„¶”¼ŗīĄ®
- JUGEM ¤ņ³Ś¤·¤ą
-
- Åź¹Ę¤¹¤ė”¦¤ß¤ó¤Ź¤Č¤Ä¤Ź¤¬¤ė
- „Ö„ķ„°„Ę”¼„Ž
- „Ö„ķ„°¤Ī¤ŖĀź
- ¤½¤ĪĀ¾¤Ī„³„ó„Ę„ó„Ä
- ·ŻĒ½æĶ”¦ĶĢ¾æĶ¤Ī„Ö„ķ„°
- „¹„Ś„·„ć„ė„¤„ó„æ„ӄ唼
- JUGEM ¤ņ³Ś¤·¤ą °ģĶ÷

„É„ķ”¼„ó
¤³¤Ī„Ę”¼„Ž¤ĖÅź¹Ę¤µ¤ģ¤æµ»ö”§154·ļ | ¤³¤Ī„Ę”¼„Ž¤ĪURL:https://jugem.jp/theme/c91/24487/

- Ē¤°Õ¤Ī„É„ķ”¼„ó

-
ŗī¼Ō¤Ī„Ö„ķ„°¤Ų”§”Öyouhana2109”פµ¤ó¤Ī„Ö„ķ„°
¤½¤ĪĀ¾¤Ī„Ę”¼„Ž”§”Öyouhana2109”פµ¤ó¤¬ŗīĄ®¤·¤æ„Ę”¼„Ž°ģĶ÷(8·ļ)


„ā”¼„攼
„ā”¼„攼¤Ė¤ĻĶĶ”¹¤Ź¼ļĪą¤¬¤¢¤ź¤Ž¤¹¤Ī¤Ē”¢¤³¤³¤Ē¤Ž¤Č¤į¤Ž¤¹”£ „ā”¼„攼¤Ī¼ļĪą¤Č¤·¤ĘĀē¤¤ÆŹ¬¤±¤ĘDC„ā”¼„攼¤ČAC„ā”¼„攼¤ĖŹ¬¤«¤ģ¤Ž¤¹”£ DC¤ĻDirect Current”¢AC¤ĻAlternative Current¤Ī¤³¤Č¤Ē”¢¤½¤ģ¤¾¤ģľĪ®”¢øņĪ®¤ņ°ÕĢ£¤·¤Ž¤¹”£ ¤Ä¤Ž¤ź”¢DC„ā”¼„攼¤ĻľĪ®¤ĪÅÅø»¤ĒĘ°ŗī¤·”¢AC„ā”¼„攼¤ĻøņĪ®¤ĪÅÅø»¤ĒĘ°ŗī¤·¤Ž¤¹”£¤Ž¤æøå½Ņ¤·¤Ž¤¹¤¬”¢DC„ā”¼„攼¤Ī·ēÅĄ¤ņŹä¤Ć¤æ„Ö„é„·„ģ„¹DC„ā”¼„攼¤ČøʤŠ¤ģ¤ė¤ā¤Ī¤ā¤¢¤ź¤Ž¤¹”£ DC„ā”¼„攼¤Ė¤Ä¤¤¤Ę DC„ā”¼„攼¤ĪĘĆħ¤ņ²¼¤Ė¼Ø¤·¤Ž¤¹”£ ĶųÅĄ ”¦µÆĘ°„Č„ė„Ƥ¬Āē¤¤¤”£ ”¦ÅÅ°µ¤ĖĀŠ¤·¤Ę²óžæō¤¬ČęĪć¤¹...
make drone | 2016.04.03 Sun 11:28
„Մ鄤„Č„³„ó„Č„ķ”¼„锼
„Մ鄤„Č„³„ó„Č„ķ”¼„é¤Č¤Ļ”¢„É„ķ”¼„ó¤ĪʬĒ¾¤Č¤Ź¤ėÉōŹ¬¤Ē¤¹”£ „Մ鄤„Č„³„ó„Č„ķ”¼„é¤Ė¤Ļ”¢„ׄķ„Ż¤«¤é¤ĪĢæĪįæ®¹ę¤¬¼õ段”¤ņÄĢ¤·¤ĘĘž¤ź”¢¤Ž¤æ„É„ķ”¼„ó¤Ī»ŃĄŖ¤ä¾õĀÖ¤ņ„»„ó„·„ó„°¤·¤Ę¤¤¤ė³Ę„»„ó„µ”¼¤«¤é¤Ī殹ę¤āĘž¤Ć¤Ę¤¤Ž¤¹”£ ¤½¤·¤Ę”¢ĢæĪį殹ę¤Č³Ę„»„ó„µ”¼¤«¤é¤Ī殹ę¤ņĶѤ¤¤Ę·×»»¤·”¢„ā”¼„攼¤Ė殹ę¤ņĮ÷¤Ć¤Ę¤½¤ģ¤¾¤ģ¤Ī„ׄķ„Ś„é¤Ī²óžæō¤ņĄ©øꤷ¤Ž¤¹”£ ¤³¤ģ¤Ė¤č¤ź„É„ķ”¼„ó¤ĻĮą½Ä¼Ō¤Ī»×¤¤ÄĢ¤ź¤ĖČō¹Ō¤¹¤ė¤³¤Č¤¬¤Ē¤¤Ž¤¹”£ „Մ鄤„Č„³„ó„Č„ķ”¼„锼¤Ī»Å»ö
make drone | 2016.04.03 Sun 11:24
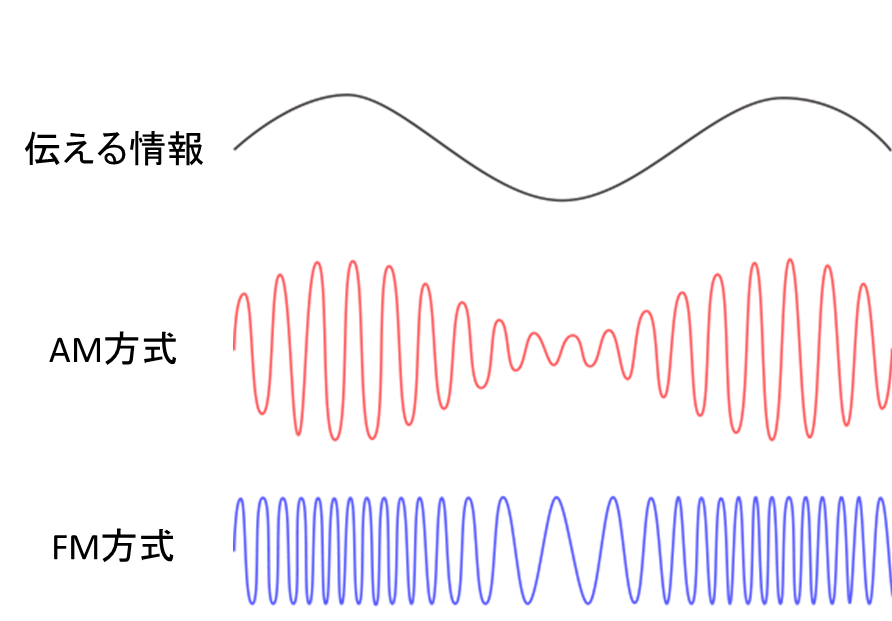
Į÷¼õ段”
„É„ķ”¼„ó¤ņČō¹Ō¤µ¤»¤ė¤æ¤į¤Ė”¢¾å¾ŗ”¢²¼¹ß”¢Ąū²óÅł¤ĪĢæĪį¤ņ½Š¤·¤ĘÅĮ¤Ø¤Ź¤±¤ģ¤Š¤Ź¤ź¤Ž¤»¤ó”£¤³¤ĪĢæĪį¤Ī¤ä¤ź¤Č¤ź¤ĻĢµĄž¤ņ»Č¤Ć¤Ę¹Ō¤¤¤Ž¤¹”£ ĢµĄž¤Č¤Ļ”¢„±”¼„Ö„ė¤ņ»Č¤ļ¤ŗ¤ĖÅż§ĒȤņĶѤ¤¤Ę¹Ō¤¦ÄĢ殤Ī¤³¤Č¤ņøĄ¤¤¤Ž¤¹”£ ÄĢ殤¹¤ė¤æ¤į¤Ė¤ĻÅż§ĒȤĖ²æ¤é¤«¤Ī¾šŹó¤ņ¾č¤»¤ĘÅĮ¤Ø¤Ź¤±¤ģ¤Š¤Ź¤ź¤Ž¤»¤ó”£ „é„ø„³„ó¤Ė¤Ŗ¤¤¤ĘĢµĄžÄĢæ®¤Č¤·¤Ę¼ēĪ®¤Ź¤ā¤Ī¤Ļ”¢AMŹż¼°”¢FMŹż¼°”¢2.4GHzĀÓ¤Ī3¼ļĪą¤¬¤¢¤ź¤Ž¤¹”£ AM”ŹAmplitude Modulation”ĖŹż¼°¤Ē¤Ļ”¢Åż§ĒȤĖ¾šŹó¤ņ¾č¤»¤ėŹżĖ”¤Č¤·¤Ę”¢¤½¤ĪÅż§ĒȤĪæ¶Éż¤ņĶųĶѤ·¤Ž¤¹”£ ¾šŹó¤ņÅż§ĒȤĪæ¶Éż¤Ė“¹¤Ø¤ĘĮ÷殤·”¢¼õæ®...
make drone | 2016.04.03 Sun 11:22
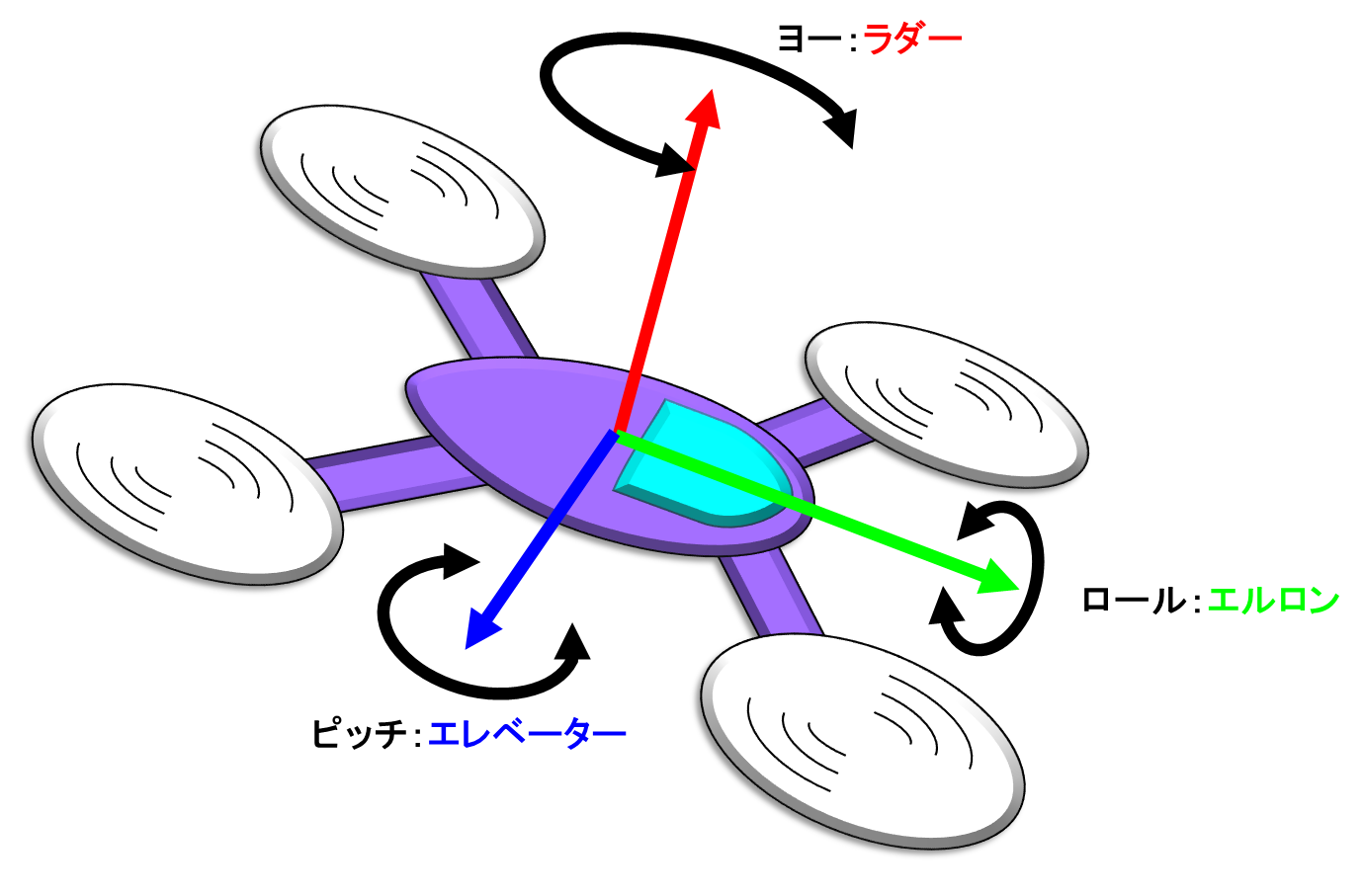
„ׄķ„Ż
„É„ķ”¼„ó¤Ī„³„ó„Č„ķ”¼„ė¤Ė¤Ŗ¤¤¤Ę”¢Čō¹Ōµ”¤Ī¾ģ¹ē¤Čʱ¤ø¤Æ„Ō„Ć„Į”¢„ķ”¼„ė”¢„č”¼¤Ī3¼ļĪą¤¬¤¢¤ź¤Ž¤·¤æ”£¤½¤·¤Ę”¢¤½¤ģ¤¾¤ģ„ׄķ„Ż¤ņĶѤ¤¤Ę„³„ó„Č„ķ”¼„ė¤·¤Ž¤¹¤¬”¢¤½¤ģ¤¾¤ģ¤ņ„³„ó„Č„ķ”¼„ė¤¹¤ė„¹„Ę„£„Ć„Æ¤Ī¤³¤Č¤ņ„Ø„ģ„Ł”¼„攼”¢„Ø„ė„ķ„ó”¢„é„Ą”¼¤ČøʤӤŽ¤¹”£¤³¤Īøʤӏż¤ĻĮ“¤ĘČō¹Ōµ”¤Ī„³„ó„Č„ķ”¼„ė¤«¤é¤¤Ę¤¤¤Ž¤¹”£ „É„ķ”¼„ó¤Ī„³„ó„Č„ķ”¼„ė ¤µ¤Ę”¢„É„ķ”¼„ó¤ņĮą½Ä¤¹¤ė¤æ¤į¤Ė„ׄķ„Ż¤¬É¬ĶפȤŹ¤ź¤Ž¤¹¤¬”¢„ׄķ„Ż¤ĪĮą½ÄMODE¤Ļ2¤Ä¤¢¤ź¤Ž¤¹”£ MODE 1¤Ļ”¢ĘüĖܤĒ¼ēĪ®¤Č¤Ź¤Ć¤Ę¤¤¤ėČō¹ŌŹż¼°¤Ē¤¹”£ ±¦¼ź¤Ē„¹„ķ„Ć„Č„ė¤Č„Ø„ė„ķ„ó¤ņ„³„ó...
make drone | 2016.04.03 Sun 11:19

„É„ķ”¼„ó¤Ī³Ę„Ń”¼„Ä
„Õ„ģ”¼„ą µ”ĀĪ¤Ī„Õ„ģ”¼„ą¤Ē¤¢¤ź”¢¤¹¤Ł¤Ę¤ĪÅŚĀę¤Č¤Ź¤ź¤Ž¤¹”£°Ā¤¤¼ł»é¤Ī¤ā¤Ī¤«¤é¹ā²Į¤Ź„«”¼„Ü„óĄ½¤Ī¤ā¤Ī¤Ž¤ĒĶĶ”¹¤Ź¤ā¤Ī¤¬¤¢¤ź¤Ž¤¹”£¤Ž¤æ”¢ĶŃÅÓ¤Ė¤č¤Ć¤Ę¤ā·Į¤¬°Ū¤Ź¤Ć¤Ę¤¤Ž¤¹”£ „Õ„ģ”¼„ą ÅÅø»„Ü”¼„É „Š„Ć„Ę„ź”¼¤«¤é¤ĪÅÅø»¤ņ³Ęµ”“ļ¤ĖŹ¬ĒŪ¤¹¤ė¤Ī¤ĖɬĶפȤŹ¤ź¤Ž¤¹”£„Õ„ģ”¼„ą¤ČÅÅø»„Ü”¼„ɤ¬°ģĀĪ¤Č¤Ź¤Ć¤Ę¤¤¤ė¤ā¤Ī¤ā¤¢¤ź¤Ž¤¹”£ ÅÅø»„Ü”¼„É „Š„Ć„Ę„ź”¼ „ā”¼„攼¤ä³Ęµ”“ļ¤ņĘ°¤«¤¹¤æ¤į¤ĖÅÅø»¤¬É¬ĶפĒ¤¹”£„É„ķ”¼„ó¤Č¤·¤Ę¤Ļ„ź„Ż„Š„Ć„Ę„ź”¼(„ź„Į„¦„ą„Ż„ź„Ž”¼„Š„Ć„Ę„ź”¼)¤¬¼ēĪ®¤Č¤Ź¤Ć¤Ę¤¤...
make drone | 2016.04.02 Sat 23:05
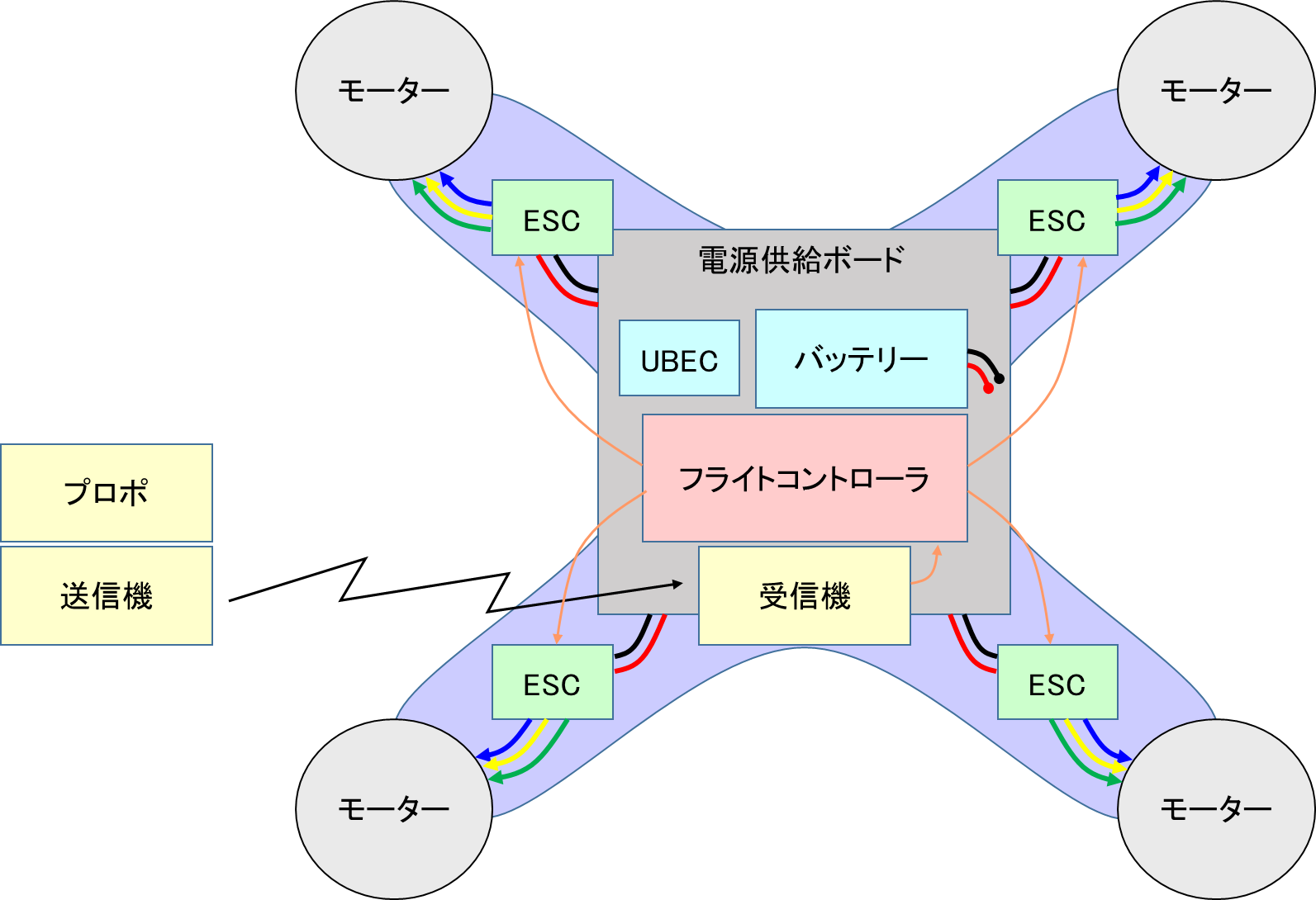
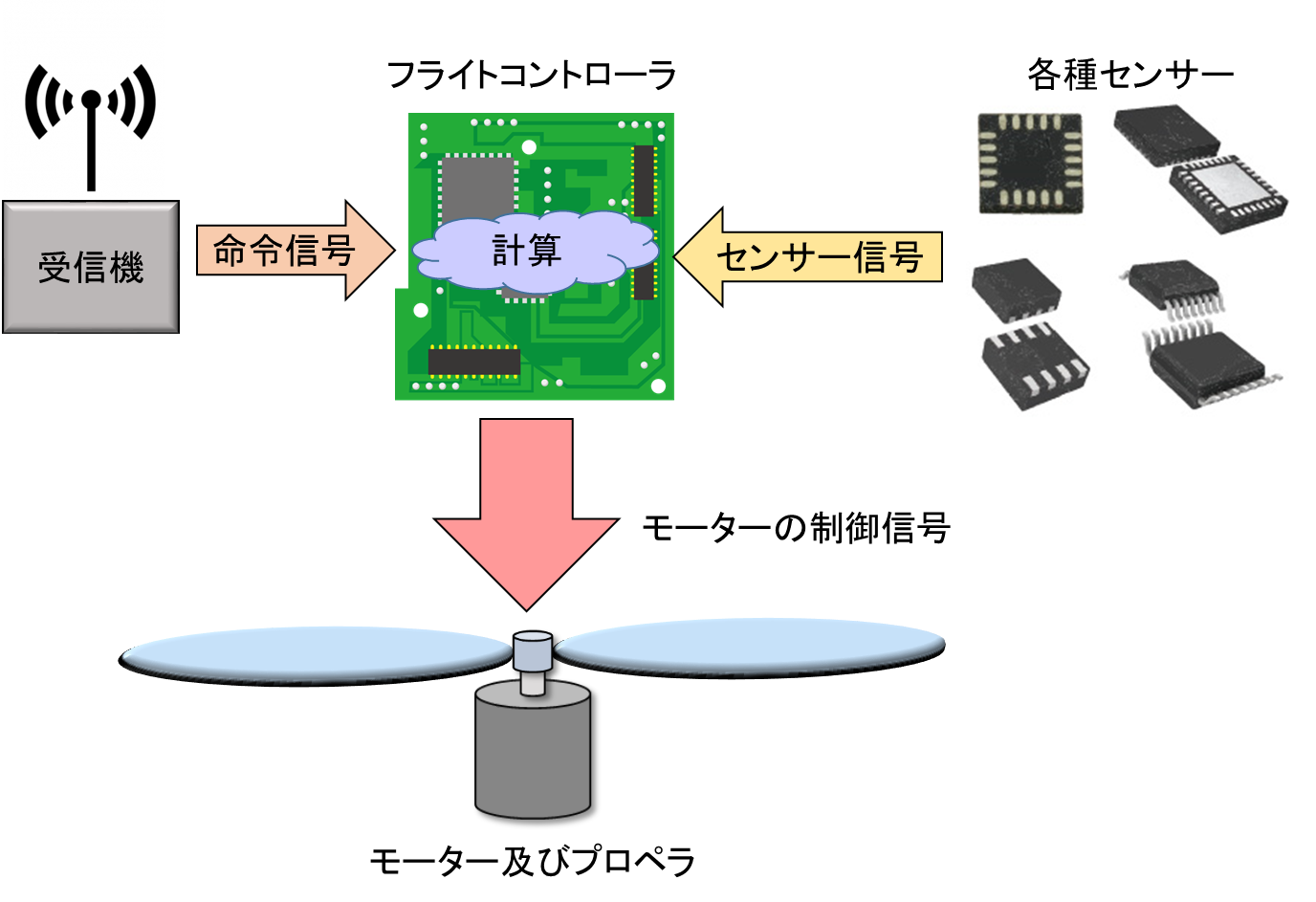
„É„ķ”¼„ó¤ĪĮ“ĀĪ¹½Ą®
¤³¤³¤Ē¤Ļ”¢„É„ķ”¼„ó¤ĪĮ“ĀĪ¹½Ą®¤ņĄāĢĄ¤·¤Ž¤¹”£ ¤Ž¤ŗ”¢„É„ķ”¼„ó¤ņĮąŗī¤·¤æ¤Č¤¤Ī殹ę¤ĪĪ®¤ģ¤ņÄɤƤʤߤŽ¤¹”£ „É„ķ”¼„ó¤ņĮąŗī¤¹¤ė¤æ¤į¤Ė¤Ļ„³„ó„Č„ķ”¼„餬¤Ź¤±¤ģ¤Š¤Ź¤ź¤Ž¤»¤ó”£¤³¤ģ¤ņ„ׄķ„Ż¤ČøʤӤŽ¤¹”£ „ׄķ„Ż¤ĒĮąŗī¤·¤æ„¹„Ę„£„Ć„Æ¤ĪĘ°¤¤ĻĮ÷段”¤ĒÅÅĒȤĖ¾č¤»¤é¤ģ¤Ę„É„ķ”¼„ó¤Ī¼õ段”¤ĖÅžĆ£¤·¤Ž¤¹”£ ¤½¤ĪÅÅĒȤņ殹ę¤ĖŹŃ“¹¤·¤Ę„Մ鄤„Č„³„ó„Č„ķ”¼„é¤ĖĮ÷¤ź¤Ž¤¹”£ „Մ鄤„Č„³„ó„Č„ķ”¼„é¤Ė¤ĻĶĶ”¹¤Ź„»„ó„µ”¼¤¬¼č¤źÉÕ¤±¤é¤ģ¤Ę¤Ŗ¤ź”¢¤½¤ģ¤é¤Ī„»„ó„µ”¼¤Ī殹ę¤Č¼õ段”¤Ė¤č¤ź¼õ殤·¤æĢæĪįæ®¹ę¤«¤é„ā”¼„攼¤ŲÅĮ¤Ø¤ėŗĒŬ¤Źæ®¹ę¤ņ·×»»¤·¤ĘESC”ŹElec...
make drone | 2016.04.02 Sat 22:51

„Ž„ė„Į„³„ׄ攼¤Ī„愤„×
„É„ķ”¼„ó¤Č¤¤¤¦¤Č”¢°ģČĢÅŖ¤Ė4Ėē¤Ī„ķ”¼„攼¤¬¤Ä¤¤¤æČō¹ŌŹŖĀĪ¤ņɽ¤·¤Ž¤¹¤¬”¢„ķ”¼„攼¤¬4Ėē¤Ä¤¤¤Ę¤¤¤ė¤ā¤Ī¤ņ”Ö„Æ„¢„Ć„É„³„ׄ攼”×”¢6Ėē¤Ä¤¤¤Ę¤¤¤ė¤ā¤Ī¤ņ”Ö„Ų„„µ„³„ׄ攼”×”¢8Ėē¤Ä¤¤¤Ę¤¤¤ė¤ā¤Ī¤ņ”Ö„Ŗ„Æ„Č„³„ׄ攼”פČøʤӤŽ¤¹”£ „Æ„¢„Ć„É”¢„Ų„„µ”¢„Ŗ„Æ„Č¤Ļ¤½¤ģ¤¾¤ģ4”¢6”¢8¤ņ°ÕĢ£¤·¤Ę¤Ŗ¤ź”¢„®„ź„·„ćøģ¤ä„é„Ę„óøģ¤¬Ķ³Ķč¤Č¤Ź¤Ć¤Ę¤¤¤Ž¤¹”£ ¤½¤·¤Ę”¢¤³¤Ī¤č¤¦¤ĖŹ£æō¤Ī„ķ”¼„攼¤¬¤Ä¤¤¤Ę¤¤¤ė¤ā¤Ī¤ņĮķ¾Ī¤·¤Ę„Ž„ė„Į„³„ׄ攼¤Čøʤó¤Ē¤¤¤Ž¤¹”£ „Æ„¢„Ć„É„³„ׄ攼 „Ų„„µ„³„ׄ攼¤Č„Ŗ„Æ„Č„³„ׄ攼 °ģČĢÅŖ¤Ź„Ų„ź„³„ׄæ...
make drone | 2016.04.02 Sat 22:15
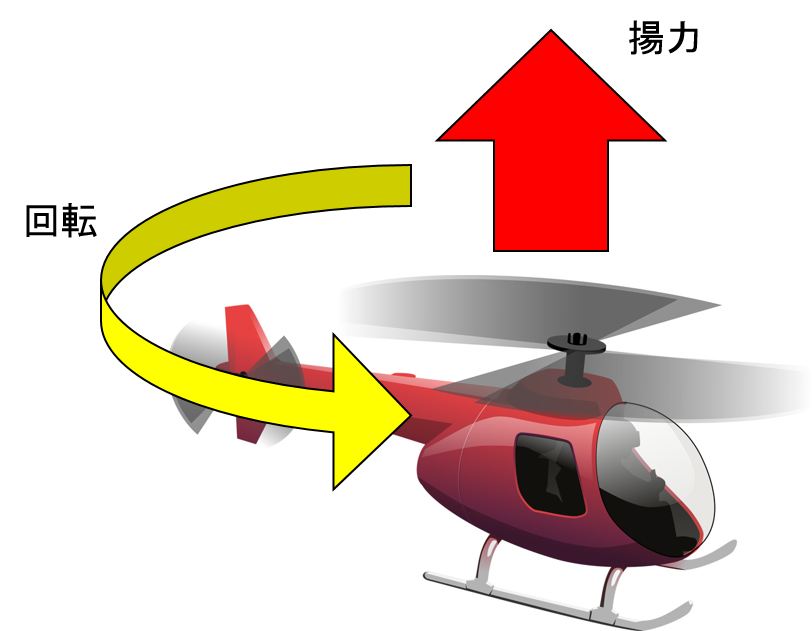
„Ų„ź„³„ׄ攼¤ĪČō¹Ōø¶Ķż
Čō¹Ōµ”¤ĪČō¹Ōø¶Ķż¤Ė¤Ŗ¤¤¤Ę„³„¢„ó„Ąøś²Ģ¤Ė¤č¤ėĄāĢĄ¤ņ¤·¤Ž¤·¤æ¤¬”¢ĶČĪĻ¤ņĘĄ¤ė¤æ¤į¤Ė¤Ļ¶õµ¤¤ĖĪ®¤ģ¤¬¤Ź¤±¤ģ¤Š¤¤¤±¤Ž¤»¤ó”£ Čō¹Ōµ”¤Ē¤Ļ¾ļ¤ĖČō¹Ō¤·¤Ę¤¤¤ė¤æ¤į¶õµ¤¤ĖĪ®¤ģ¤Ļ¤Ē¤¤Ž¤¹¤¬”¢„Ų„ź„³„ׄ攼¤Ī¤č¤¦¤Ė¶õĆę¤ĖĄÅ»ß¤¹¤ė¾ģ¹ē¤Ļ¶õµ¤¤ĪĪ®¤ģ¤Ļ¤Ē¤¤Ž¤»¤ó”£ ¤½¤³¤Ē„Ų„ź„³„ׄ攼¤Ī²óžĶć¤Ē¤¢¤ė„ķ”¼„攼¤ņ²óž¤µ¤»¤ė¤³¤Č¤Ė¤č¤ź”¢„Ų„ź„³„ׄ攼¤ĻĄÅ»ß”Ź„Ū„Š„ź„ó„°”Ė¤·¤Ę¤¤¤Ę¤ā„ķ”¼„攼¤Ī„Ö„ģ”¼„ɼž¤ź¤Ė¤Ļ¾ļ¤ĖĪ®¤ģ¤¬¤Ē¤¤Ę¤¤¤ė¾õ¶·¤ņŗī¤ź¤Ž¤·¤æ”£ ¤³¤ģ¤Ė¤č¤ź„ķ”¼„攼¤ĖĶČĪĻ¤¬Ąø¤ø”¢Čō¹Ō¤¹¤ė¤³¤Č¤¬¤Ē¤¤Ž¤¹”£ Čō¹Ōµ”¤Č„Ų„ź„³„ׄ攼¤Ī°ć¤¤¤Č¤·¤Ę”¢...
make drone | 2016.04.02 Sat 21:21

„É„ķ”¼„ó¤Ī¼ļĪą
„É„ķ”¼„ó¤Ī¼ļĪą¤Ė¤Ä¤¤¤Ę¤Ē¤¹¤¬”¢„Ž„ė„Į„³„ׄ攼¤Ī„愤„פäĀē¤¤µ”¢ĶŃÅÓ¤Ė¤č¤Ć¤ĘĶĶ”¹¤Ź¤ā¤Ī¤¬¤¢¤ź¤Ž¤¹”£ ¶õ»£¤ņ¤·¤ĘÉįĆŹø«¤ė¤³¤Č¤Ī¤Ē¤¤Ź¤¤¤č¤¦¤Ź·Źæ§¤Ī»£±Ę¤ņ³Ś¤·¤ó¤Ą¤ź”¢¼«Ź¬¤Ī„Ŗ„ź„ø„Ź„ė¤Ī„É„ķ”¼„ó¤ņ¼«ŗī¤·¤Ę”¢ŗī¤ė¤³¤Č¤ņ³Ų¤ó¤Ą¤ź”¢„¢„Æ„ķ„Š„Ć„ČČō¹Ō¤äČō¹Ō„愤„ą¤ņ¶„¤¦¤č¤¦¤ŹĮą½Ä¤ĪĻÓ¤ņĖį¤Æ¤Ź¤É”¢ĶĶ”¹¤Ź³Ś¤·¤ßŹż¤¬¤¢¤ź¤Ž¤¹”£ ¤³¤³¤Ē¤Ļ”¢ĶĶ”¹¤Ź³ŃÅŁ¤«¤é„É„ķ”¼„ó¤Ī¼ļĪą¤ņŹ¬Īą¤·¤Ę¤ß¤Ž¤¹”£ Āē¤¤µ¤Ė¤č¤ėŹ¬Īą ¤Ž¤ŗ”¢¹Ņ¶õĖ”¤Ė¤č¤źµ¬Ą©¤ņ¼õ¤±¤ėĀŠ¾Ż¤Ļ½ÅĪĢ¤¬200g°Ź¾å¤Ī„É„ķ”¼„ó¤Č¤Ź¤Ć¤Ę¤¤¤Ž¤¹”£ ¤Ź¤Ī¤Ē”¢200g°Ź²¼¤Ī„É„ķ”¼„ó¤Ė...
make drone | 2016.04.02 Sat 19:00
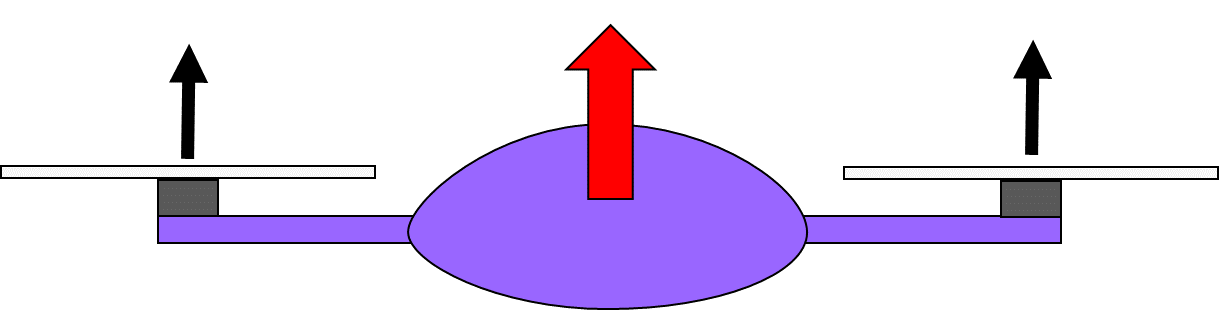
„Æ„¢„Ć„É„³„ׄ攼¤ĪČō¹Ōø¶Ķż
„Æ„¢„Ć„É„³„ׄ攼¤Ī¾ģ¹ē”¢4¤Ä¤Ī„ķ”¼„攼¤¬¤¢¤ź¤Ž¤¹¤¬”¢»ž·×²ó¤ź¤¬2¤Ä”¢Č滞·×²ó¤ź¤¬2¤Ä¤¢¤ź”¢¤½¤ģ¤¾¤ģĀŠ³ŃĄž¾å¤ĖĄßĆÖ¤µ¤ģ¤Ž¤¹”£¤³¤ģ¤Ļ”¢µ”ĀĪ¤Ė¤«¤«¤ė„č”¼¤Ī„ā”¼„į„ó„Ȥ¬“Ų·ø¤·¤Ę¤¤¤ė¤æ¤į¤Ē¤¹”£ Īć¤Ø¤Š”¢„ķ”¼„攼¤ņ»ž·×²ó¤ź¤Ė²óž¤µ¤»¤č¤¦¤Č¤¹¤ė¤Č”¢„ā”¼„攼¤Ė¤ĻŗīĶŃČæŗīĶѤĪ“Ų·ø¤«¤éČ滞·×²ó¤ź¤Ī„ā”¼„į„ó„Ȥ¬¤«¤«¤ź¤Ž¤¹”£Į“¤Ę¤Ī„ķ”¼„攼¤ņʱ¤øŹżøž¤Ė²óž¤µ¤»¤ė¤Č”¢Į“ĀĪ¤Č¤·¤Ęµ”ĀĪ¤ĖČæĀŠøž¤¤Ī„ā”¼„į„ó„Ȥ¬ČÆĄø¤·¤Ę¤·¤Ž¤¤”¢µ”ĀĪ¤ņĄ©øę¤¹¤ė¤³¤Č¤¬¤Ē¤¤Ź¤Æ¤Ź¤Ć¤Ę¤·¤Ž¤¤¤Ž¤¹”£ ¤Ž¤æ”¢¤Ź¤¼ĀŠ³ŃĄž¾å¤ņʱ¤ø²óžŹżøž¤Ė¤¹¤ė¤«¤Ė¤Ä¤¤¤Ę¤Ļ”¢°Ź²¼...
make drone | 2016.04.02 Sat 18:42
Į“154·ļĆę 121 - 130 ·ļɽ¼Ø (13/16 „Ś”¼„ø)
- „ø„ć„ó„ė
- „Ķ„Ć„Č”¦WEB
- „«„Ę„“„ź”¼
¤¢¤Ź¤æ¤Ī„Æ„ź„Ø„¤„Ę„£„Ö¤ņ»É·ć¤¹¤ė”¢
200.71GB¤ĪĀēĶĘĪĢ¤ČŹŲĶų¤Ź¹āµ”Ē½”Ŗ