- JUGEM を楽しむ
-
- 投稿する・みんなとつながる
- ブログテーマ
- ブログのお題
- その他のコンテンツ
- 芸能人・有名人のブログ
- スペシャルインタビュー
- JUGEM を楽しむ 一覧

ロボット製作
このテーマに投稿された記事:94件 | このテーマのURL:https://jugem.jp/theme/c137/15084/

- 趣味はロボット製作です!

-
作者のブログへ:「gintun2」さんのブログ
その他のテーマ:「gintun2」さんが作成したテーマ一覧(1件)

REX・赤外線リモコン完成
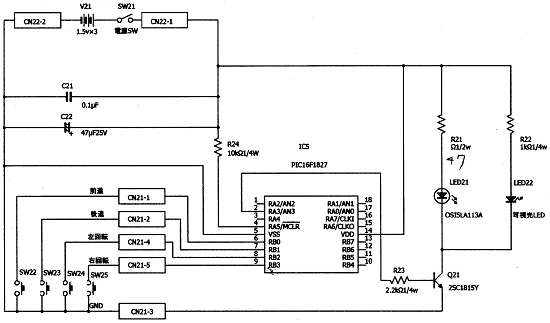
JUGEMテーマ:ロボット製作 ようやく赤外線リモコンが完成しました。 先回投稿(5月23日)にLED点滅確認できる受信器ができた(記事はこちら)ので、いよいよ、REXの回路とプログラムにも赤外線リモコンの受信機能を入れ込みました。 モーターからのノイズで難儀しましたが、モーター電源とマイコン系電源を分ける事によって克服♪ 送信機は、すでに作って(記事はこちら)ある4スイッチ搭載の簡単なものを利用しました。 スイッチの役割は、前進1歩、後退1歩、右回転1歩、左回転1歩、です。 送受信がうまくいき、回路...
にじいろ飛行船 | 2015.06.09 Tue 20:21
REX・赤外線リモコン受信機に着手
JUGEMテーマ:ロボット製作 送信機が出来た(記事はこちら)ので、次は受信機の製作開始です。 回路図とプリント基板パターンは難しくなく、スムーズにできました。 LEDを4つ載せて、送信機のスイッチの数と合わせました。 これが出来上がった実物です。 すでに作ってあった送信機と並べてみました。 それぞれの基板がら飛び出しているのが赤外線LEDであり、受講センサーであります。 さて、ここからが難問です。 プログラムの考え方は、下の様にしました。 1.受光センサーの出力を受け、リーダー信号に該当するかど...
にじいろ飛行船 | 2015.05.20 Wed 11:17
REX・赤外線リモコンの送信機できた♪
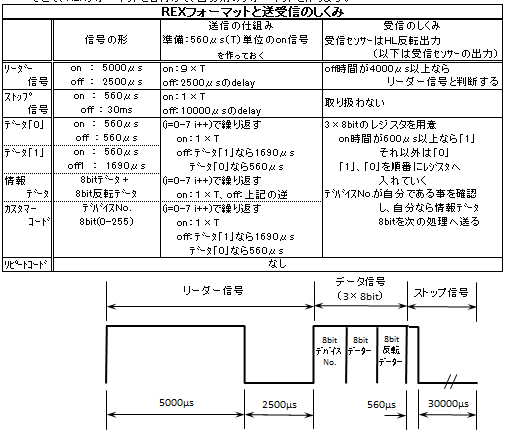
JUGEMテーマ:ロボット製作 赤外線リモコンの送信機が出来た。 ここまでサブキャリアを作るところまでできていた(記事はこちら)ので、今回は、次のステップとして「通信フォーマット」の検討に入りました。 世の中の家電用の赤外線リモコンにはNECフォーマットとかソニーフォーマットとかが有るらしいので、それを参考に簡易型のフォーマットを考え、「REXフォーマット」と名付けました。 これがREXフォーマットです。 この送信パルスのhighの部分でサブキャリア波が送信されます。 なお、今回はカスタマーコードとして受...
にじいろ飛行船 | 2015.05.19 Tue 18:02
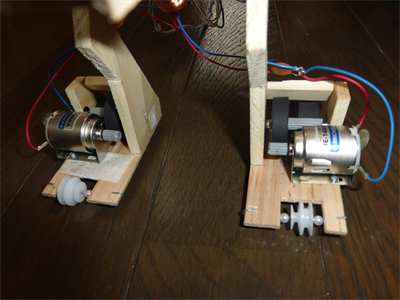
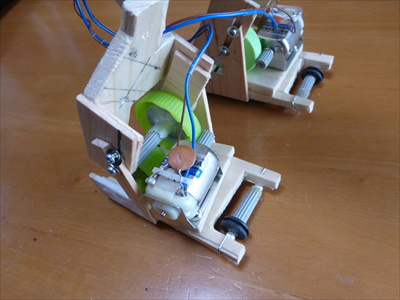
REX足・試作5でようやく納得♪
JUGEMテーマ:ロボット製作 REXの足の試作は3月で4回を数えました。 しかしまだ納得できるだけの安定した動作を得る事は出来ていません。(記事はこちら→) そこで、今回は2点を改良してみました。 1.駆動用の車輪を、ペットボトルキャップからゴムローラーに変更 駆動力伝達性と地面との密勅性改良狙い 2.モーターをFA-130RAからFA-140RAへ変更 駆動力を約20%アップ これが試作5。 黒いローラーがゴムローラー。 手前に見えるのが中間ギアの役目で、奥に見えるのが車輪の役目。 2段減速...
にじいろ飛行船 | 2015.05.18 Mon 19:13
REX・赤外線リモコン挑戦開始
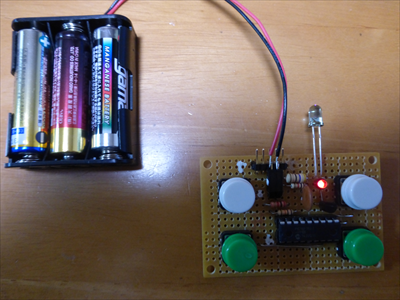
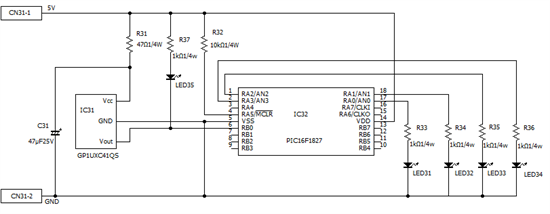
オシロスコープも買ったし(記事はこちら→)、いよいよ赤外線リモコン作りに突入です。 とっかかりとしてサブキャリア(搬送波)を作り、これで赤外線LEDを点滅させます。38MHz、デューティ33%のパルス波です。 まず回路を作ります。 マイコンの端子2がパルス幅変調用出力に使えますので、この端子からの出力でトランジスタを動かし、このトランジスタで赤外線LEDを駆動します。赤外線は目に見えないので、並行して赤色LEDも駆動します。 有線リモコンで使っていたプリント基板を流用したので、スイッチ類やコネクタ...
にじいろ飛行船 | 2015.04.12 Sun 11:01
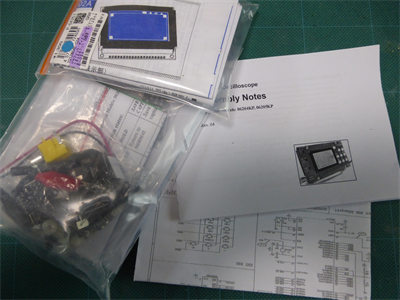
おもちゃ買っちゃった
JUGEMテーマ:ロボット製作 またまた、オモチャを買ってしまいました。 説明書は英文だけだよ、部品は自分でハンダ付けしてね、と言うものでしたが、軽く許容できる範囲なので買っちゃいました。 で、送ってきたのが右の写真のようなセット。 まる1日かけて完成しました。 そうです、オシロスコープです。 秋月電子で発売している組み立てキット(こちら→)を大枚4700円はたいて買いました。 さて電源投入。 続いてパルスの波形を観測。 ジャーン、 どうやらうまくできたようです。 ところで、なぜこのオ...
にじいろ飛行船 | 2015.04.03 Fri 11:15
REX試作4用上半身できた♪
JUGEMテーマ:ロボット製作 ずいぶんと時間がかかってしまった・・・・が、どうやら納得できる上半身ができました。 1つのモーターで首上下と口の開閉を同時に実行させる機構は昨年9月(記事はこちら→)にできていたけど、「口を大きく開かせたい」とか「はりぼてといえども安定して動かしたい」とか「修理や設計変更の時に簡単に対応できるようにしておきたい」とか、あれやこれや思いついて、木片を組合せていました。 そして出来上がった3週間の苦労の結晶・・・・ 動画にしておきました。 お口はしっかり開いてくれ...
にじいろ飛行船 | 2015.03.31 Tue 19:59
REX・プログラム修正
JUGEMテーマ:ロボット製作 先回までで、どうやらこうやら足のメカが使用に耐えるものになりました。 次はメカのばらつきに合わせてモーター回転時間を決めていきます。 これまで・・・ 前進=右2秒回転→1秒休み→左2秒回転→1秒休み 後退=右1秒逆転→1秒休み→左1秒逆転→1秒休み 左回転=右2秒回転→1秒休み 右回転=左2秒回転→1秒休み と、仮の値を入れていましたが、メカの動きは、左回転スイッチONで270°回り、右回転スイッチONでは90°しか回転しな...
にじいろ飛行船 | 2015.03.07 Sat 19:10
REX・試作4になってしまった
JUGEMテーマ:ロボット製作 2月16日の日記「REX・足の試作3」(こちら→)の中で、試作4も必要かな〜と書きましたが、やっぱりメカ的な完成度がいまいちなのでしs買う4を作る事にしました。 試作3からの大きな変更点は、モーターと中間ギアを平行に配置し回転伝達を確実にした点、前車輪を一つにした点です。 こんな風にモータを足の甲の上に移しました。 おかげで、すねの部分もすっきりしました。 今回は、足だけではなく、胴体部分も作りドッキングしました。 胴体部分には電池ボックス(単3×3)、首操...
にじいろ飛行船 | 2015.03.06 Fri 10:57
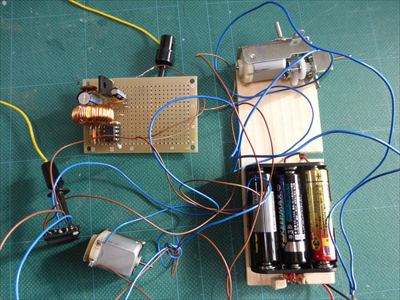
REX・組込み基板の試作
JUGEMテーマ:ロボット製作 2月1日に、モータードライブ回路がしっかり動くことが確認できました(→こちらの記事) 又、1月21日には、使えそうなプログラムを作り上げることができました(→こちらの記事) そこで、ロボットを動かすためのプリント基板の試作に取りかかりです。 限られたスペースしかありませんので、プリント基板は72mm×47mmの既製品にします。 まず電源部として9V、5Vの安定化電源、単3電池×3のパワー電源の3種類を使います。 これらの電源を供給する為に、基板の5分の2を使っ...
にじいろ飛行船 | 2015.02.27 Fri 17:10
全94件中 31 - 40 件表示 (4/10 ページ)
