- JUGEM を楽しむ
-
- 投稿する・みんなとつながる
- ブログテーマ
- ブログのお題
- その他のコンテンツ
- 芸能人・有名人のブログ
- スペシャルインタビュー
- JUGEM を楽しむ 一覧

ロボット製作
このテーマに投稿された記事:94件 | このテーマのURL:https://jugem.jp/theme/c137/15084/

- 趣味はロボット製作です!

-
作者のブログへ:「gintun2」さんのブログ
その他のテーマ:「gintun2」さんが作成したテーマ一覧(1件)

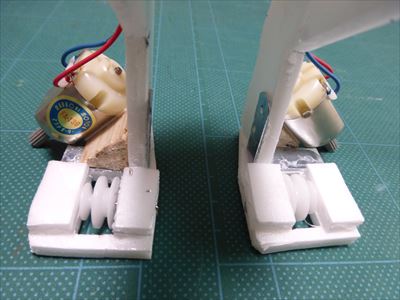
REX・足の試作3
JUGEMテーマ:ロボット製作 恐竜ロボットREX君を作り始めて早や半年。 マイコンなどの電子回路の試作と足の試作を繰り返してきました。 思い起こせば、最初の足はスチレンボードで作った「開発試作」でした。(こちらの記事で紹介→) モーターの軸に網戸押さえ用のゴムを挿して、モーター軸の回転をそのまま水平方向の力に変換しました。 判りやすくてシンプルだけど、動きが早すぎる上に調整しろが無いので、次の試作で改善する事にしました。 試作1は下の様になかなかの見た目になりました。 右の写真の様に、モ...
にじいろ飛行船 | 2015.02.16 Mon 10:37
REXモータードライブに再挑戦
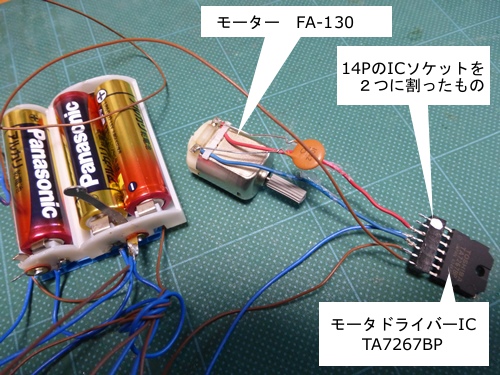
JUGEMテーマ:ロボット製作 昨年の11月27日に「REXモータードライブIC断念」なんて記事(記事はこちら)を書いてしまったけど、どうも腑に落ちない。 そこで、改めてモーターとモータードライブICの相性を確認することにしました。 今回は作業の下手さの影響を少なくする為に、プリント基板上の実装では無く、実態配線だけで回路を組みました。 単3電池を3個直列に接続して4.5Vを作り、 プラスをTA7267BPのピン6に接続、マイナスをピン4に接続しました。 外部10V電源のプラスはTA7267BPのピン7に接続、マイナスは乾電...
にじいろ飛行船 | 2015.02.01 Sun 18:56

REXプログラムは一区切り
JUGEMテーマ:ロボット製作 なんだかんだでプログラムができるようになったので、すっかり気を良くしてしまった。 いよいよ実機REXの動きを想定してプログラミングして見ましょう。 プログラミングの前にフローチャートとマトリックスを書きましたが、ここではマトリックスを紹介。 基本的な足の動きをLEDで代行させます。 できあがったプログラムをデバッグ基板で動かして見ました。 成功です。 ぱちぱちぱち・・・(自画自賛) プログラムを作るのに結構時間がかかりました。 これは、ソースファイルの分割にも挑戦した...
にじいろ飛行船 | 2015.01.21 Wed 11:00
REX4作目のプログラム
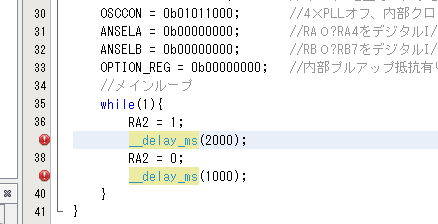
JUGEMテーマ:ロボット製作 生まれて初めてのC言語プログラム作成を先回ブログしたが、動作確認の結果、OKでした。 その後暮れ・正月の間もゴソゴソとやって、4作目まで進みました。 1作目・・・スイッチオンでLED点灯(先回アップ分) 2作目・・・スイッチ4個、LED4個に増やして、同様の動作 3作目・・・for文を使ってLED点滅繰り返し 4作目・・・delay関数を使ってLED点滅繰り返し スムーズに進んだのですが、4作目にちょっとしたトラブルがありました。 エディタ画面上で「__delay_ms関数」を記述...
にじいろ飛行船 | 2015.01.10 Sat 15:04
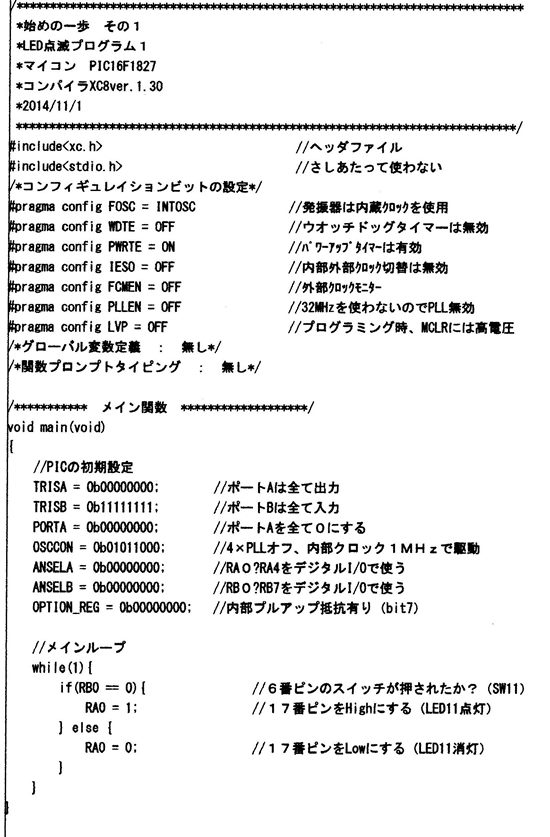
REX初めてのC言語
JUGEMテーマ:ロボット製作 全ての道具立てが終わったので、いよいよプログラミング。 生まれて初めてのC言語は「スイッチを押すとLEDが点灯する」と言うものにしました。 すいすいと行くと思っていたけど、「コンフィギュレーションビット」の設定とかが、手ごわい!! マイコンの中味を知らなくては話にならないので、PIC16F1827の「Data Sheets」を探し出して拾い読み開始♪ えーご、エーゴ、英語、English・・・・それでいて専門的・・・・ 「コンフィギュレーションビット」の難関を突破して、なんとかプログラミングできま...
にじいろ飛行船 | 2014.12.26 Fri 11:03
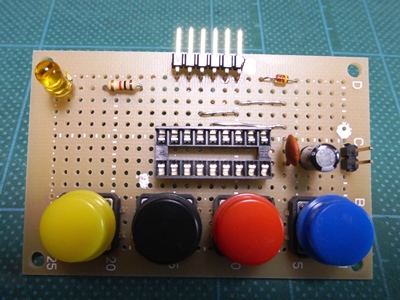
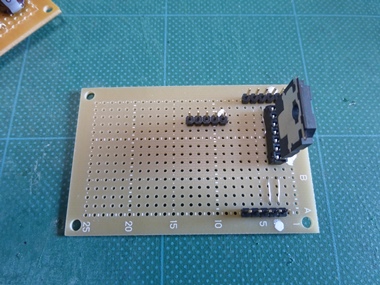
REXデバッグ基板作ったよ
JUGEMテーマ:ロボット製作 プログラミングの道具立てが、ゆっくりペースではあるものの、着々と進んでいます。 PICkit3まで揃えましたので、残るはデバッグ基板です。この基板は、PICkit3とつないでマイコンにプログラミングを書き込む為に必要です。 マイコンは、ごそごそ楽しむのに十分な性能を持つPIC16F1827にします。 できあがった基板は、こちら。 4つのタクトスイッチを搭載しておきました。4入力でのデバッグができます。 LEDも4つ搭載する事にしたのですが、手持ちが無いので1つだけ搭載しました。一応設計...
にじいろ飛行船 | 2014.12.12 Fri 19:25

REXプログラミング準備
JUGEMテーマ:ロボット製作 モータードライブ回路ですったものだしているうちに、ネットで注文しておいたマイコンとプログラマーが届きました。 マイコンは、 1.安くて入手しやすいもの 2.本やネットなどでの設計情報が豊富 3.C言語でプログラム 4.機能が幅広いもの を条件に絞り込み、マイクロチップ社の18ピンDIP型、PIC16F1827にしました。一気に5個も買っちゃったけど、それで650円だから、財布へのダメージはほとんど無し!! プログラマーは、PICkit3。 「まずは買いました」と...
にじいろ飛行船 | 2014.12.05 Fri 11:14
REXモータードライブIC断念
JUGEMテーマ:ロボット製作 前回(11月24日)でモータードライブ回路の電源電圧を上げなくてはならない事に気が付いたので、電池をもう一つ追加して4.5Vにしました。ついでに、モータードライブICの入力保護抵抗はあまり意味が無いので外しました。 計算上は、これでドライブIC出力には2.5〜1.5Vかかるはずです。無負荷(モーターつながない)状態にしてテスターで実測すると1.5Vでした。狙い通りです。 しかしモーターを接続すると電圧は1V以下に下がります。しかも電源ON直後から徐々に下がっていきます。まあ...
にじいろ飛行船 | 2014.11.27 Thu 10:59
REX回路で足踏み
JUGEMテーマ:ロボット製作 さてマイコン設計だと意気込んでみたものの、どうもモーター周りの動きがしっくり来ない。 電池をプラスマイナス逆に接続したら動かなくなってしまった。テスターで当たっていくとモータードライブIC・TA7267BPの直前までは正常。こりゃ、ICがやられちゃったかな。 プリント基板からICを外して修理しても良いけど、気分一新、基板を作り直す事にしました。 気分一新ついでに、不要と判断した入力回路保護抵抗100Ω4個を外し、TA7267BPをハンダ直付けからソケット差し込みに変更しました。TA2678B用...
にじいろ飛行船 | 2014.11.24 Mon 11:43
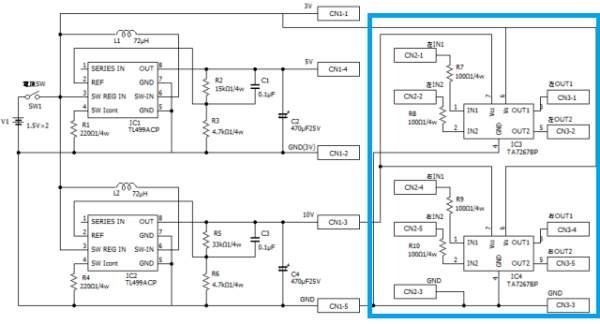
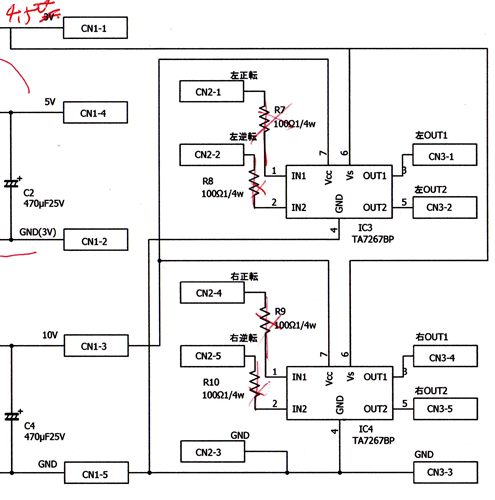
REX電源回路とモータードライブ回路
JUGEMテーマ:ロボット製作 前回は電源回路を作りましたので、同じ基板の空きスペースにモータードライブ回路2つを組み込みます。REXの両足の駆動です。 回路図は下の通り。 水色で囲んだ回路が今回組み込んだ部分。 モータードライブICは、東芝のTA7267BPを使用しています。 実際の基板は右の通り。 単純に部品費合計すると約2000円也。 もう少し安い回路を考えなくっちゃ。次は。 電池ボックスと取り付け板とで、ひとつのユニットになります。 電源スイッチもこの取り付け板上に載せますが、今回は暫定で電池...
にじいろ飛行船 | 2014.10.13 Mon 19:16
全94件中 41 - 50 件表示 (5/10 ページ)